After clicking the "Start" button the Radar simulation will start, and NMEA sentences will be sent to the selected output port of the PC, until the "Stop" button is pressed. Note that only those NMEA sentences will be sent that are checked in the "NMEA sentences" panel.
All sentences are shown in the I/O Port Monitor as they are output. When logging is ON (toolbar option), the sentences will also be written to the user selected log file.
Clicking the "Stop" button will suspend the operation, until "Start" is clicked again.
When the Transmit Interval is set to 0.0 the sentences are output as "single shot" each time you click the "Start" button.
Clicking the little X top-right will exit the object and save optionally all current values, so that next time the instrument is used it can continue where it stopped. Note: saving is an optional setting in the General Settings.
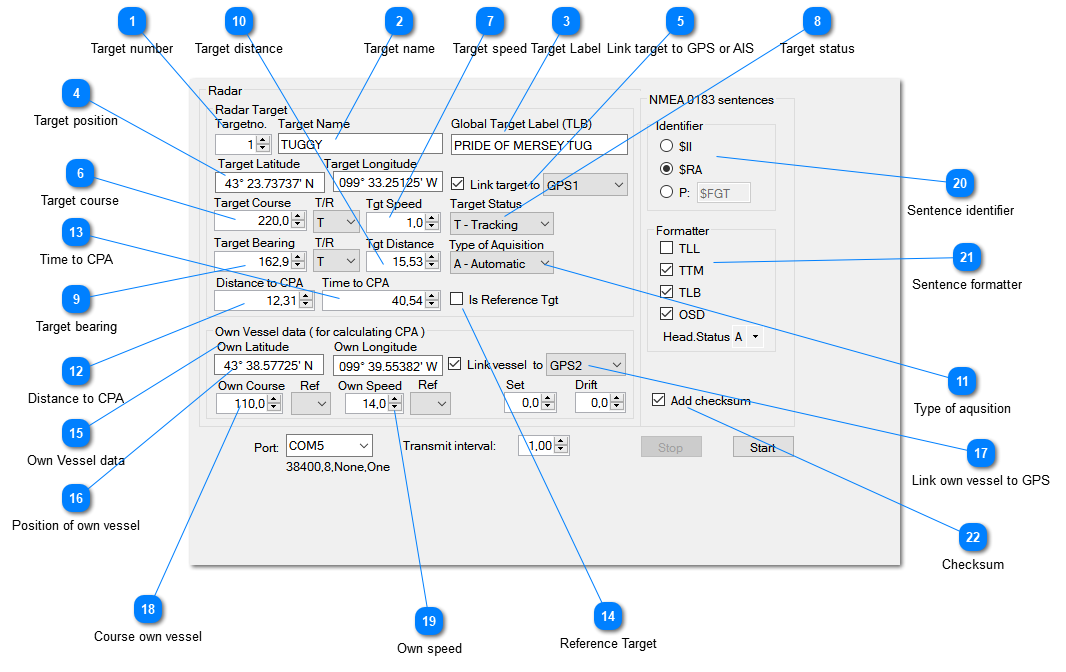
Based on course and speed, taken from the value of the controls in the Object Control Center, the position of the Radar Target is automatically updated every n second, whereas n is the interval set by the user.
Target position, Course and speed can optionally be taken from a selected active GPS instrument or Class A/B AIS target. When the checkbox is checked a dropdown control will open, showing all available active GPS instruments and AIS targets.
Select the object required and the navigation data will be taken from the linked GPS instrument or AIS target. When an AIS target is linked, the AIS target in turn can also be linked to a GPS. This can be very convenient when this GPS is set up to sailing an automatic route.
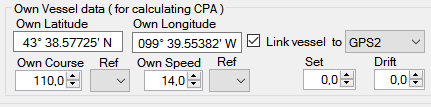
The CPA distance is dynamically calculated from the position, course and speed of the "Own Vessel" to the position, course and speed of the Radar Target.
The CPA time is dynamically calculated from the position, course and speed of the "Own Vessel" to the position, course and speed of the Radar Target. A negative value in the Time to CPA means that the target is moving away from the CPA.
Vessel position, Course and speed can optionally be taken from a selected active GPS instrument. When the checkbox is checked a dropdown control will open, showing all available active GPS instruments.
Select the GPS required and the navigation data will be taken from the linked GPS instrument. This can be very convenient when this GPS is set up to sailing an automatic route.